Recent research published in Frontiers in Space Technologies suggests a paradigm shift in how we traverse alien landscapes. Led by Dr. Gabriela Ligeza, a post-doctoral researcher with the European Space Agency (ESA), a team of scientists has demonstrated that smaller, four-legged robots equipped with semi-autonomous software can outperform traditional human-supervised models in speed and multi-target efficiency. The study, titled "Semi-autonomous exploration of martian and lunar analogues with a legged robot using a Raman-equipped robotic arm and microscopic imager," argues that the future of space exploration lies in agility and independence rather than sheer size.
The Tyranny of Distance: The Communication Bottleneck
The primary catalyst for this shift is the physical reality of the solar system: the speed of light. Mars and Earth are separated by an average distance that results in significant communication latency. Radio signals traveling at the speed of light take anywhere from three to 22 minutes to travel one way, depending on the orbital positions of the two planets. This means a "real-time" round trip for a command and its confirmation can take upwards of 44 minutes.
Under current operational protocols, rovers like Perseverance are managed through a rigorous, slow-moving cycle. Human operators on Earth analyze images, plot a safe path, and send a batch of commands. The rover executes these commands, stops, and waits for the next set of instructions. While this "human-in-the-loop" system ensures the safety of multi-billion-dollar assets, it severely limits the amount of ground a rover can cover and the number of scientific targets it can analyze in a single Martian day (sol).
Ligeza and her colleagues argue that this methodology is increasingly a bottleneck. By shifting toward semi-autonomous systems, robots can make local decisions about navigation and target selection without waiting for terrestrial approval. This allows the machines to transition from "single-target" missions to "multi-target" prospecting, drastically increasing the scientific return per mission hour.
ANYmal: The Agile Alternative
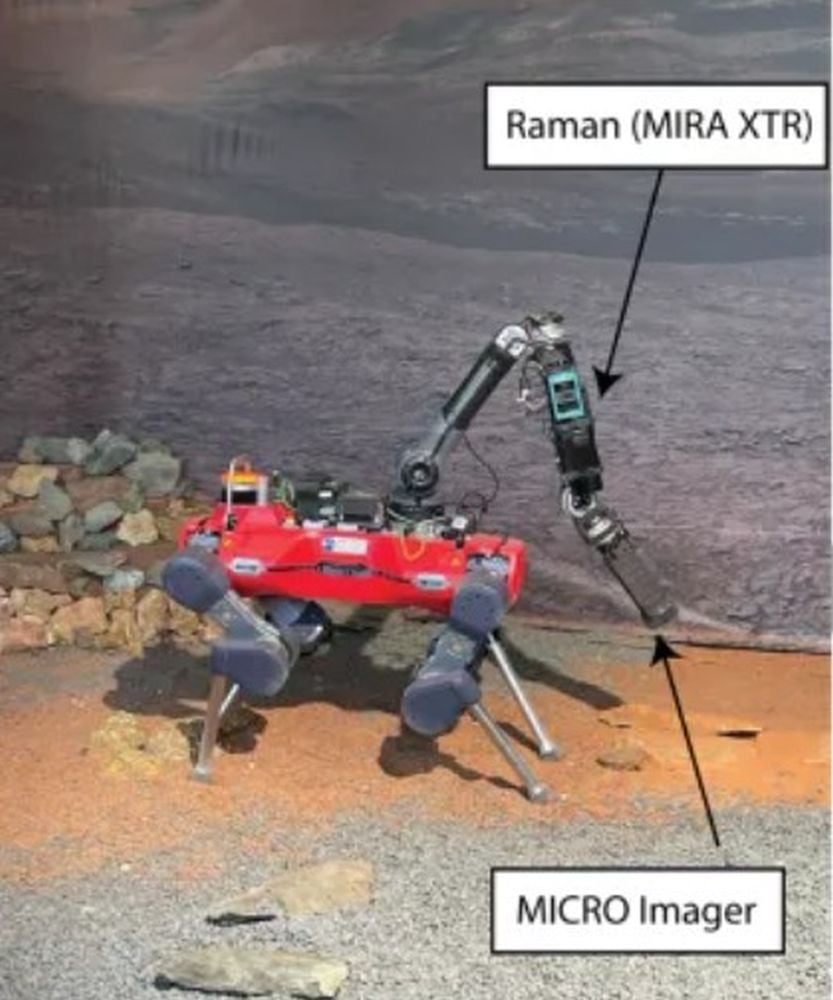
To test this new frontier of exploration, the research team utilized ANYmal, a quadrupedal robot developed by ANYbotics. Unlike the wheeled chassis of traditional rovers, which can become bogged down in soft regolith or blocked by steep inclines, ANYmal’s four legs allow it to navigate uneven, rocky terrain and even perform limited climbing. This mobility opens up "high-interest" geological sites—such as crater walls, lava tubes, and boulder fields—that were previously inaccessible to wheeled vehicles.

The experimental ANYmal was outfitted with a specialized scientific payload: a robotic arm carrying a microscopic imager (MICRO) and a Raman spectrometer. This combination was chosen specifically for its ability to provide a comprehensive look at both the physical structure and chemical composition of a sample.
Raman spectroscopy is a non-destructive chemical analysis technique which provides detailed information about chemical structure, phase and polymorphy, crystallinity, and molecular interactions. It is particularly effective at identifying minerals and organic compounds that might serve as biosignatures. When paired with the MICRO imager, which captures high-resolution textures of rocks and soil in RGB, ultraviolet (UV), and infrared (IR) spectrums, the robot becomes a powerful mobile laboratory capable of rapid "in situ" (on-site) characterization.
Simulating the Lunar and Martian Frontiers
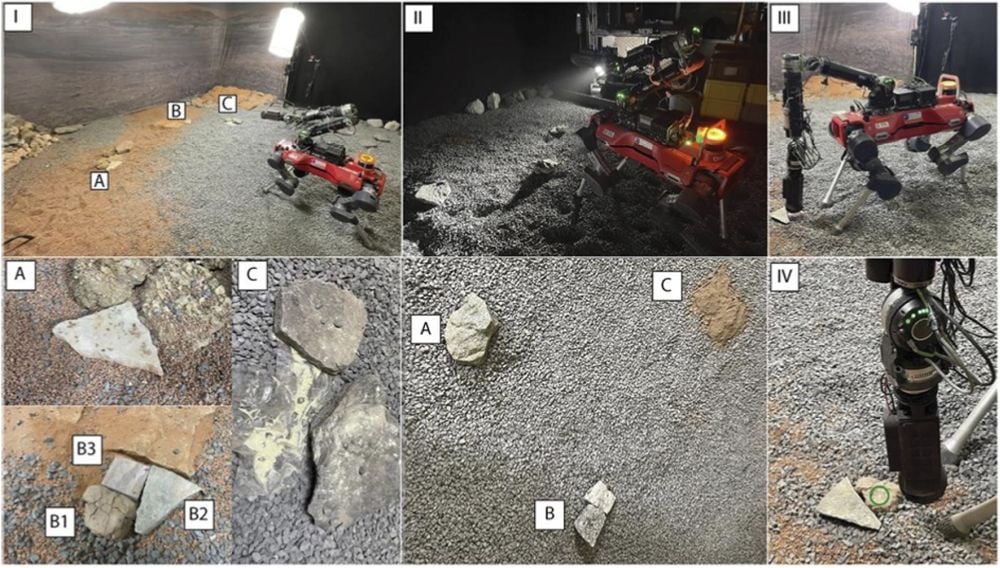
The efficacy of the ANYmal system was put to the test at the Marslabor of the University of Basel. This facility is a premier testing ground designed to simulate the harsh conditions of planetary surfaces, often used to calibrate instruments for missions like the ESA’s ExoMars.
The researchers conducted two distinct types of analogue missions:
- The Martian Analogue: Conducted during daylight hours with lighting adjusted to mimic the atmospheric scattering and intensity found on the Red Planet.
- The Lunar Analogue: Conducted in near-total darkness to simulate the extreme lighting conditions of the lunar south pole, where deep shadows and high-contrast environments pose significant challenges for optical sensors.
The samples used in the tests were not mere placeholders; they were geologically identical to materials found on the Moon and Mars. These included:
- Gypsum: A mineral frequently detected on Mars that is highly valued by astrobiologists for its ability to preserve ancient biological signatures within its crystalline structure.
- Carbonate Rocks: Also found on Mars, these are crucial for understanding the history of the Martian atmosphere and its potential to support life.
- Dunite: A lunar analogue material that serves as a potential source of oxides, which are critical for In-Situ Resource Utilization (ISRU)—the process of harvesting space resources to produce oxygen, water, or fuel.
Results: Efficiency Through Autonomy
The findings of the study were clear: semi-autonomy significantly boosts operational throughput. The researchers compared the semi-autonomous multi-target strategy against the conventional human-supervised approach. The results showed that the robot was able to identify, navigate to, and analyze multiple targets with minimal human intervention, delivering meaningful data in a fraction of the time.
One of the most striking data points from the study revealed that the Martian analogue missions collected data 22% faster than the Lunar missions. The researchers attributed this to the specific constraints of the environment, noting that the semi-autonomous strategy is particularly effective in time-restricted scenarios where real-time decision-making is impossible.
"Our research question was whether a robot equipped with a simple scientific payload could quickly study several targets while still delivering meaningful scientific results," Dr. Ligeza explained in a guest editorial. "The results proved that even relatively compact instruments can achieve the full scientific objective: identifying rocks relevant for astrobiology and resource exploration."
Broader Implications for the Future of Spaceflight
The move toward legged, autonomous robots aligns with the broader strategic goals of major space agencies. NASA, for instance, has been incrementally increasing the autonomy of its rovers through "AutoNav" software, which allows rovers to steer around hazards without human input. However, the ESA-led research suggests a more radical departure where the robot acts less like a remote-controlled car and more like a field geologist.
This shift has three major implications for the next decade of space exploration:
1. In-Situ Resource Utilization (ISRU)
As humanity prepares for the Artemis missions and the eventual establishment of a permanent lunar base, finding water ice and useful minerals is a top priority. Legged robots can act as "scouts," rapidly surveying large areas of the lunar south pole to identify the most resource-rich zones before heavy mining equipment is deployed.
2. The Search for Life
Astrobiology requires the examination of many different samples to find the proverbial "needle in a haystack." A semi-autonomous robot can scan dozens of rocks in the time it takes a traditional rover to analyze one, statistically increasing the chances of discovering biosignatures.
3. Swarm Robotics
The success of smaller, cheaper, legged robots paves the way for "swarm" missions. Instead of sending one multi-billion-dollar rover, an agency could send five or ten smaller legged robots. If one becomes trapped or malfunctions, the mission continues. These robots could even communicate with each other, dividing a search area and sharing data to build a comprehensive map of a region in record time.
Conclusion: Balancing Automation and Science
While the research highlights the advantages of autonomy, the authors emphasize that the goal is not to remove humans from the equation entirely, but to optimize the partnership between man and machine. Human scientists remain the best at interpreting complex data and making high-level strategic decisions. By offloading the "grunt work" of navigation and initial target screening to the robot, humans can focus on the high-level analysis that leads to breakthrough discoveries.
"These findings emphasize the need to balance mission automation, efficiency, and scientific return based on operational constraints and planetary environments," the study concludes.
As we stand on the precipice of a new era of lunar and Martian exploration, the image of the lone, slow-moving rover may soon be replaced by a pack of agile, four-legged scouts, trotting across the craters of the Moon and the plains of Mars, autonomously uncovering the secrets of the solar system.